モータに仕事をさせるにあたり、最も重要な要素は、トルクと回転数といえます。どんな仕事をさせるかによって必要な値は変わってきますが、
- どのくらいの力を発揮するのか(トルク)
- どのくらいの速さで仕事をさせるのか(回転数)
この2点は、モータの選定に欠かせません。どんなモータを使えばいいか?と考えたときに、まずこの2点を明確にすることは、何よりも優先されます。
Contents
用途によって求められるトルク・回転数は異なる
まずはイメージを深めていただくために、以下の3つのケースを想像してみてください。
1:電気自動車用のモータ
人を乗せて動く乗り物ですから、大きなトルクを持ったモータが必要なことは想像できると思います。走行スピードを考えると、回転数はかなり高いものが必要になりそうです。
2:車型おもちゃ用のモータ
小さな部品で構成されており、完成品も小さなものになりますので、トルク、回転数ともに1よりは圧倒的に少なくてよさそうです。
3:自動ドア用のモータ
1ほどのトルクは不要ですが、大きな扉を開け閉めする力が必要なので、2よりは大きなトルクが必要だなとイメージできます。一方扉の開けしめのスピードは速い必要はありませんので、回転数は2よりも少なくてよさそうです。
といったように、具体的な数字がなくとも、用途によって求められるトルク・回転数は異なり、適合するモータも全く異なってくることがわかると思います。実際は、必要トルク、必要回転数の値を明確に設定して、モータを選定することが大切です。ここをおろそかにすると、後工程で「トルクが足りなくて自動ドアが動かない」や、「回転数が足りなくてスピードが出ない」などの問題が生じることも少なくありません。
位置決め精度、応答速度、騒音・振動など、モータに求められるものは他にもたくさんあります。しかし、根本的に、トルク・回転数が満たされていなければ、使いようがありませんので、最初におさえるべきはトルク・回転数といえます。
さて、このトルクと回転数の関係を少し深掘りしてみます。トルク・回転数は、互いに影響をあたえる関係を持っています。イメージで捉えるために、例を挙げてみましょう。モータ搭載の車型おもちゃ上におもりを載せることを想像してみてください。
100g、200g、300gと、少しずつ重くしていくと、走るスピードにどんな影響を与えるでしょうか。そうですね、だんだん走るスピードは遅くなりますね。これが、まさにトルクと回転数の関係を表しています。
モータにかかる負荷=トルクが大きくなると、回転数が下がる。言い換えると、大きな力を発揮するためには、モータの回転は遅くならざるを得ない、ということです。
モータの性能によって、速度変化の程度は変わります。これを表したものをT-Nカーブと呼びます。(T:トルク N:回転数)モータメーカからは一般開示されている場合もあります。T-Nカーブがどんなものであるか、実際に見ていきましょう。
モータの性能線図T-Nカーブとは
ある値のトルクを負荷したとき、回転数がいくつで出力されるのかを示したものを、T-Nカーブと呼びます。
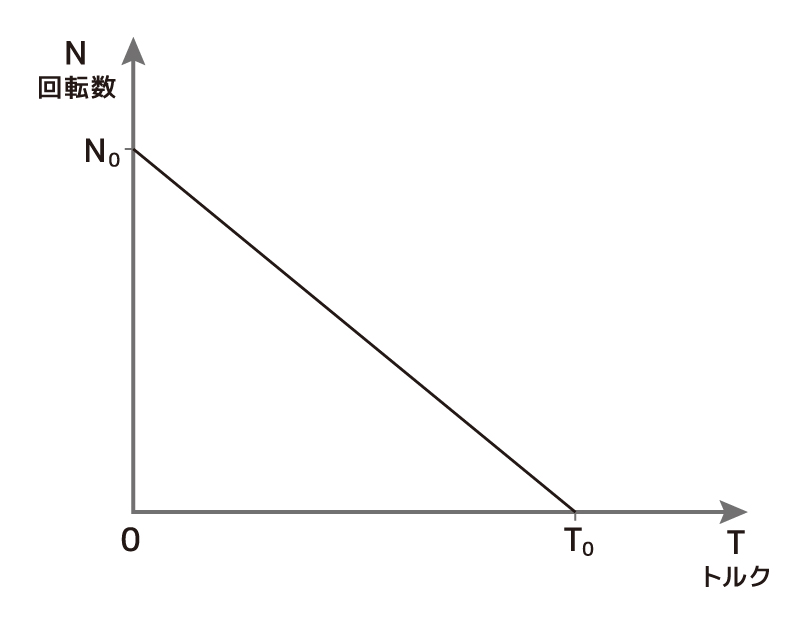
横軸T:トルク、縦軸N:回転数
T0:最大トルク
出力できる最大のトルク。これ以上大きい負荷を与えると回転が止まる
N0:無負荷回転数
モータの出力軸に何も接続しないとき(負荷がゼロ)にモータが回転する値。これ以上早くは回らない、という値。
グラフを見ると、モータにかかる負荷Tが大きくなるにつれて、回転数Nが下がることがわかると思います。このグラフを読み解くことで、そのモータが「必要な特性を満たすものかどうか」を判定することができます。
参考ですが、このグラフはこちらの式をもとに生成されています。(詳細は今回割愛しますが、DCモータの等価回路から導き出される式です。)
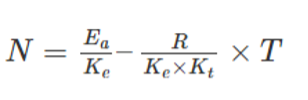
N:回転数、Ea:電源電圧、Ke:逆起定数数、R:電機子抵抗、Kt:トルク定数、T:トルク
また、モータの出力[kW]は、
T[N・m]×2πN[r/min] ÷60÷1000
にて求めることができます。これは、単位換算の関係で2π、60、1000などの数値が入っているものの、「トルクと回転数を乗じたもの」に他なりません。すなわち、「どのくらいの力で、どのくらいのスピードで回転させるか」。これが出力の大きさを表します。「パワフルなモータほど強い力で高速で回る」というイメージに一致しますね。
机上の計算式と、現実の肌感覚をあわせていくことは、物理現象の理解のためには重要と思いますので、紹介いたしました。
T-Nカーブの使用例
実際に例を上げて、T-Nカーブでのモータの選定を行ってみましょう。今回は、よりわかりやすくするため、モータをそのまま出力軸として使用することを前提として考えてみます。(=ギヤボックスなどのトルク・回転数調整機構を介さない)
※パターン1・2の説明は、あくまで考え方の一例であり、現実のアプリケーションにおいて不適切である可能性があります。また、具体的な値を使っておりますが、あくまでイメージをつかみやすくするための数値であり、実際の用途に対してこの値が適切であるかどうかの正確性は低いことをご理解ください。
パターン1 車型おもちゃ用のモータの選定
ターゲットトルク:10[g・cm]
ターゲット回転数:2700[r/min]
ターゲット点は、モータAのカーブの上に載っています。今回の用途はおもちゃですので、厳密なトルク・回転数が求められるわけではないと考えられます。
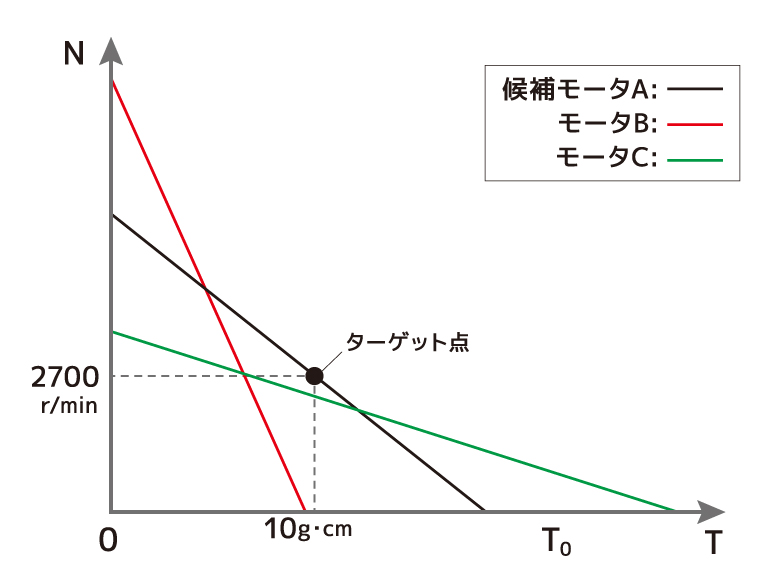
トルク・回転数が個体差で多少変動したり、おもちゃの設置面の素材や傾斜などで、ターゲットと若干違うトルクがかかったりしたとしても、走行速度に多少影響を及ぼす程度ですので、問題になることはないといえそうです。よって、この場合モータAを採用で検討を進めてよさそうです。
パターン2 電気自動車用のモータ
ターゲットトルク:200[N・m]
ターゲット回転数:6000[r/min]
ターゲット点はモータBの上に載っています。パターン①のときと同じように考えて、モータB を採用すればよい……と思う方もいらっしゃるかもしれませんが、ちょっと待ってください。自動車用のモータは、人を乗せて快適に移動することが求められます。
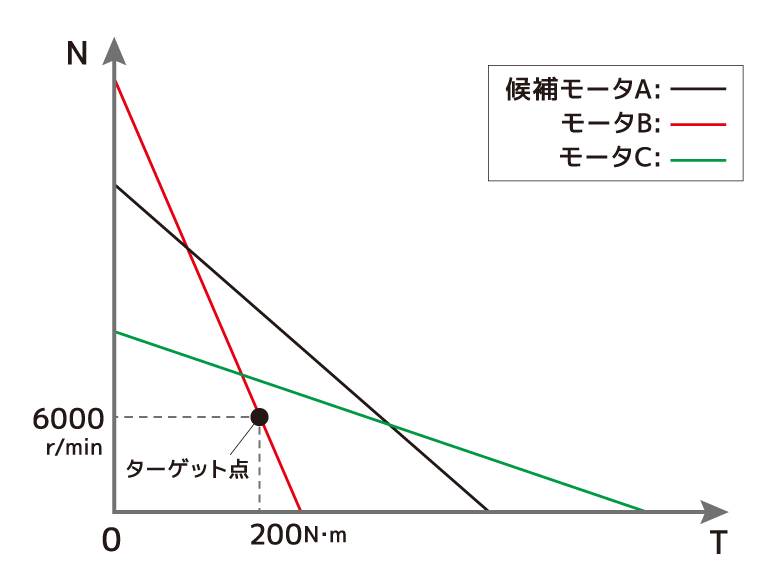
路面状態や風による影響、載せる人数による荷重の変化、坂道での走行などで、モータにかかるトルクが大きく変動することが想定されます。
そのため、モータBでは、求められる回転数を安定して出力できないと想定されます。この場合、モータAやCのような、ターゲット点よりも上回る特性をもつモータを採用し、外部の速度制御装置を使って(事項参照)、回転数を調整しながら使う、といった方法が良いと考えられます。さらに、モータAとCでは、最大トルク・最大回転数が大きく異なりますので、自動車用モータの場合は最大トルクの大きいモータCが適切、という判断になるかもしれません。
このように、使い方や想定される事象によって、モータの選定方法は変わってきます。
1・2は、「モータを使ってシステムを作る」という、モータを使う側の視点で説明しましたが、モータを開発する側であるメーカがお客様に提案をする際も、同様のことを行います。お客様の用途を聞き、必要なトルク・回転数を理解し、それに合わせたモータを提案する。用途を把握していれば、若干調整したほうがより良い提案になる、という発想も生まれますので、カスタマイズの提案をすることもあります。
また、上記の説明で示したことからわかるように、T-Nカーブで示されているのは、モータのフルパワーの特性です。外部の速度制御装置などで回転数を下げて使った場合、TNカーブ上のトルクを維持したまま、回転数を下げることが可能になります。パターン2のように、トルク・回転数に余裕を持たせたい場合、ターゲットを上回る特性を持つモータを採用し、制御機能を使って調整することがほとんどです。
外部からどのような手を尽くしても、モータの持つ特性以上の値を引き出すことはできないので、最初のモータ選定が重要となります。続いて、制御方法を説明いたします。
モータのトルクと回転数を調整する方法
電気的調整
電圧制御(可変抵抗器)
基本となる制御方法です。印加電圧によってT-Nカーブが変化しますので、電圧を制御することでトルク・回転数を調整可能です。直流電源、可変抵抗器、モータをすべて直列につなげば、最も簡易な電圧制御方式が完成します。
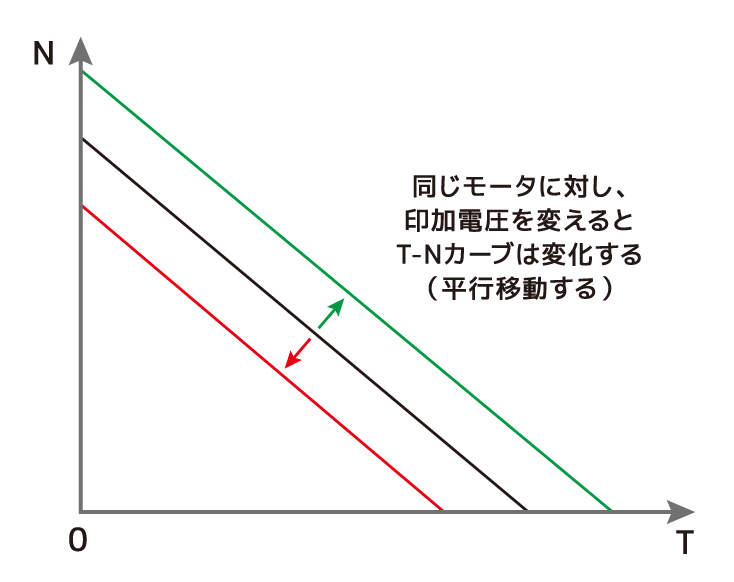
可変抵抗器の値を変えることで、モータに印加される電圧を調整すると、トルク・回転数が変化します。
PWM制御(Pulse Width Modulation パルス幅変調)
モータへの電圧印加を連続的なパルス波状に行い、印加電圧を擬似的に変化させる方式です。このパルスの幅(ON・OFF時間)の比率を変化させることで、モータを駆動する平均電圧を変化させ、回転数を制御します。
PAM制御(Pulse Amplitude Modulation パルス振幅変調)
PWMがパルス幅を変動させるのに対し、PA Mは電圧自体を変動させます。直流電圧を直接変えるのは、複雑な回路構成が必要になり、コスト面にも影響があるため、PAM方式を採用することは少ないです。高電圧で駆動させるエアコンのモータなどで使われています。
周波数制御(インバータ制御)
ここまでは、DCモータの調整方法でした。ACモータにおける調整方法も参考に紹介いたします。ACモータの回転数は多くの場合、電源である交流の周波数に影響を受けます。コンセントの交流電源をダイレクトにACモータに接続していた場合、交流周波数は東日本では50Hz、西日本では60Hzと異なるため、同じモータを東日本、西日本で用いると回転数が変わります。これでは使い勝手が悪い場合が多々あります。
回転数を調整したい場合は、モータと電源の間にインバータという装置を挟み、周波数を任意に変更します。これにより回転数を可変することが可能となります。
機械的調整
ギアボックス
モータの出力軸をギアボックスに接続することで、トルクをアップ・回転数低下が可能です。(そのため、ギアボックスを減速機と呼ぶこともあります)ギア比を調整することで、同じモータでも異なるトルク・回転数にコントロールすることが可能です。必要な出力になるよう、ギア比を調整して使用します。
プーリ・ベルト機構
モータ出力軸にプーリをつけ、ベルトを介して離れた場所にあるプーリを回転させる機構です。プーリの径の比率を変えることにより、トルク・回転数の調整が可能です。ギアボックスにおける、ギア比と同じ考え方となります。
機械的調整による変換効率
一般的には、こういった機械的な変換を行うことによるエネルギー損失は小さく、変換効率は90%前後が一般的です。しかしながら、減速比が大きければ大きいほど、効率は悪化します。何倍にもトルクを増やそうとした場合、ギアのかみ合わせ歯数がふえるため、歯数一つ一つのロスが重なり、効率は下がることになります。これを踏まえた設計が必要となります。
モータのトルクと回転数を最適化する方法
オープンループ制御
オープンループとは、「指示するだけ」という制御方式です。ステッピングモータを例として説明します。
ステッピングモータは受け取ったパルス信号に応じて、軸を「正確に回転」させることができます。「右に1000rpmで回転しなさい」という司令に対して、きっちりその通りに回転させることができます。指示した通りに動作できるので、「本当に右に1000rpmで回転しているかな」という結果を確認する必要がない場面では、とても使い勝手が良いです。なお、ステッピングモータは、モータが発揮できるトルク限界を超えない限りは、トルクが変動しても回転数を維持してくれます。すなわち、自動的に最適なトルクを発揮できるといえます。
しかし、もしも何らかの外力で負荷トルクがモータの限界を超え、モータが停止してしまった場合、オープンループはあくまで「結果を確認しない」ので、自動復帰などすることもなく、何も対処されないままとなります。外力による影響を考慮しなくてはいけない場面には不向きであるといえます。
クローズドループ制御(フィードバック制御)
クローズドループとは、「指示した結果を確認して、指示し直す」という制御方式です。サーボモータを例として説明します。
サーボモータは、位置制御、速度制御、トルク制御が可能で、指定された位置に正確に移動・停止、指定速度での回転といったことが実現できます。このためには、センサー機能が重要で、さまざまなセンサーが取り付けられています。センサーがその時々で状況を司令塔に報告し、その報告内容をもとに指示し直す、といった動きになります。
例えば、「右に1000rpmで回転しなさい」という司令をクローズドループ制御で実現するとどうなるかを見てみましょう。
司令塔「右に1000rpmで回転しなさい!」
モータ「わかりました。回転します。」
センサー「今、900rpmを到達しました!」
司令塔「まだ目標に到達していない。さらに電圧値を上げて、回転数を上げなさい!」
モータ「わかりました。」
センサー「いきすぎて1100rpmで回転しているようです!」
司令塔「電圧値を下げて、1000rpmを目指しなさい!」
モータ「わかりました。」
センサー「無事に目標の場所に到達しました!」
司令塔「そのまま監視を続けなさい!」
センサー「負荷に変動があり、800rpmに下がってしまいました!」
司令塔「電圧値を上げて、発生トルクを高め、1000rpmを目指しなさい!」
モータ「わかりました。」
センサー「無事目標到達しました!」
・・・
このようなイメージで、モータに出した司令に対し、センサーが状況を確認し、指示を修正することを繰り返すのが、クローズドループ制御です。
外乱による変動もしっかりカバーすることが可能です。
フィードフォワード制御
フィードフォワード制御は、「変化が発生する前にその変化を予想して対処する」という考え方です。エアコンを例に考えてみます。
エアコンの温度調整機能は、
センサーが室温を検知 → 室温と設定温度と比較 → 室温が設定温度に近づくよう冷気や暖気を送り込む
という、フィードバック制御を採用したシステムが一般的だと思います。しかしこれだと、天候の変化や、そこに住む人たちの暮らしのリズムによってはうまく機能しない場合があると思います。例えば、曇っていた天気が急に晴れ、外気温が急激に上がったり、突然の夕立で湿度が高まるなどで屋内の環境に影響を与えたとき。または、夕方子どもたちが3人一度に帰ってきて、人数が増えたことにより急激に室内の温度が上昇したなどがあったとき。エアコンは変化を検知してから調整を開始するので、しばらく不快な環境が続く可能性があります。
そこで、天候の状態や、家族の帰宅状況をエアコンが事前に把握し、室内環境の悪化を検知する前に、先に空調の調整をかけるといったことができれば、環境変化は最小限に済みます。現代では、IoTも進んでいるので、技術的には実現ができそうです。
この考え方がフィードフォワード制御です。外乱を事前に予測し、それを打ち消すように動作する。しかしあくまで予想して動くため、精度は高いとはいえませんので、フィードバック制御と組み合わせて使用されます。こういったシステムの中で、モータは回転数・トルクを調整しながら求められる状態を満たすよう使われます。
ユニテックは貴社のニーズに合った、最適なトルクと回転数のモータを開発・製造します
ユニテックは、過去お手伝いしてきた経験をもとに、さまざまな用途に合わせたトルク・回転数のご提案が可能です。ぜひお気軽にご相談ください。